Устройство и принцип действия синхронного двигателя
Содержание:
- Чем отличается синхронный двигатель от асинхронного
- Синхронные двигатели: устройство и принцип действия
- Какой лучше
- Основные параметры электродвигателя
- Устройство синхронного двигателя
- 7.3.1. Усройство и принцип действия синхронного электродвигателя.
- Синхронный генератор. Принцип действия
- Недостатки электродвигателя
- Устройство синхронного электродвигателя
- Операция
- Применение
Чем отличается синхронный двигатель от асинхронного
На сегодняшний день асинхронные электродвигатели более распространены, однако они не универсальны. В некоторых ситуациях их использование нельзя считать эффективным решением производственных задач. В таких ситуациях промышленное применение синхронных двигателей считается более оправданным. В чем же разница между синхронными и асинхронными двигателями?
Под электродвигателем в целом понимается электрическая машина, преобразующая электрическую энергию в механическую при помощи ротора. Такое устройство применяется в различных промышленных механизмах.
Ключевое отличие синхронного и асинхронного двигателей заключается в принципе работы. Синхронный двигатель состоит из ротора и стартера. На роторе имеется обмотка возбуждения, на которую подается постоянный ток. Таким образом, формируется магнитное поле ротора. На стартере, в свою очередь, также имеется обмотка, формирующая свое магнитное поле только уже посредством подачи переменного тока. Частота вращения ротора синхронна частоте подаче тока, отсюда и название двигателя. Характерной особенностью синхронного электродвигателя является способность поддерживать номинальные обороты вне зависимости от мощности нагрузки.
Асинхронный электродвигатель работает по иному принципу. На роторе такого механизма обмотка отсутствует. Вместо нее находятся соединенные стержни. Ротор такого плана называется «беличья клетка». Он не питается током, а полюса на нем индуцируются магнитным полем статора. Под влиянием механической нагрузки частота вращения рамки меньше частоты вращения магнита, то есть частоты не синхронны.
Следует учитывать, что отличить синхронный двигатель от асинхронного по внешним признакам невозможно. Статоры этих механизмов устроены одинаково. Кроме того, функция этих типов электродвигателей одна и та же — создание вращающегося магнитного поля статора. Единственное весомое отличие асинхронного и синхронного двигателей – устройство ротора.
Выбирая между синхронным и асинхронным электродвигателем необходимо отталкиваться от производственных задач. В случаях, когда для работы требуется поддержание постоянных оборотов при различных нагрузках предпочтительнее использовать синхронные двигатели. К примеру, в строительных кранах или гильотинных ножницах. Надо сказать, что асинхронные двигатели в промышленности распространены гораздо больше. Ими оснащены всевозможные станки, транспортеры, вентиляторы, насосы, словом, любое оборудование со стабильной нагрузкой. В их работе снижение оборотов при повышенной нагрузке не является критичным отклонением.
Важное отличие синхронных двигателей – дороговизна. Производство таких механизмов имеет более высокую стоимость, поэтому приобретение и дальнейшее обслуживание также потребует больших вложений
Выводы:
- Асинхронный и синхронный двигатели отличаются принципом работы.
- В синхронном двигателе частота вращения ротора соответствует частоте подаче тока.
- Синхронный двигатель может поддерживать номинальные обороты при любой нагрузке, асинхронный – нет.
- Асинхронные двигатели в промышленности распространены гораздо больше, чем синхронные.
- Синхронные двигатели дороже, чем асинхронные.
Синхронные двигатели: устройство и принцип действия
Основные части синхронного двигателя – это якорь (статор, неподвижная часть) и индуктор (ротор), разделенные воздушной прослойкой. В пазы статора закладывают трехфазную распределенную обмотку – обычно она соединяется «звездой».
Рис. 2 Схема синхронного двигателя
С началом работы двигателя тока, подаваемые в якорь, создают вращение магнитного поля, которое пересекает поле индуктора, что в результате взаимодействия двух полей переходит в энергию. Поле якоря чаще называют иначе – поле реакции якоря. В генераторах такое получают при помощи индуктора. Входящие в состав индуктора электромагниты постоянного тока принято называть полюсами. При этом индукторы во всех синхронных двигателях могут исполняться по двум схемам – явнополюсной и неявнополюсной, различающиеся между собой расположением полюсов. Чтобы уменьшить значение магнитного сопротивления и тем самым улучшить условия для прохождения магнитного потока, применяют ферромагнитные сердечники. Они располагаются в статоре и роторе, для их изготовления используют специальную марку стали – электротехническую, отличающую высоким содержанием кремния – это позволяет уменьшить вихревые токи и повысить электрическое сопротивление стали.
Рис. 3. Магнитные поля в синхронном двигателе
В основу работы синхронного двигателя положен принцип взаимного влияния полюсов индуктора и магнитного поля, индуцируемого якорем. При запуске осуществляется разгон двигателя до частоты, которая близка по своему значению частоте, с которой происходит в зазоре вращение магнитного поля. Только при выполнении этого условия двигатель переходит в функционирование в синхронном режиме. В данный момент пересекаются магнитные поля, инициируемые индуктором и ротором. Этот момент в технической литературе принято называть входом в синхронизацию.
Работа синхронного двигателя наглядно представлена на видео:
Длительное время в качестве разгонного двигателя использовался стандартный синхронный двигатель, который был механически соединен с синхронным. Благодаря этому, ротор на синхронном двигателе механически разгонялся до подсинхронной скорости, а затем уже самостоятельно, за счет взаимодействия электромагнитных полей, втягивался в синхронизм. Обычно при подборе мощности пускового двигателя исходили из соотношения 10-15% от номинальной мощности разгоняемого двигателя. Такого запаса мощности вполне хватало запустить синхронный двигатель не только в холостую, но даже и при незначительной нагрузке на валу.
Рис. 4 Синхронный двигатель (1) с внешним разгонным (2) двигателем
Такой способ разгона усложняет и существенно удорожает общую стоимость, поэтому в современных двигателях от него отказались в пользу разгона в состоянии асинхронного режима. В этом случае с помощью реостата (короткозамкнутым путем) обмотки индуктора замыкают, как в асинхронном двигателе. Чтобы провести запуск двигателя в таком режиме, на ротор устанавливают короткозамкнутую обмотку, выступающую одновременно и как успокоительная обмотка, устраняющая во время проведения синхронизации раскачивание ротора. В момент, когда скорость вращения достигнет требуемого номинального значения, в индуктор будет подан постоянный ток. Но для двигателей, в которых стоят постоянные магниты, все равно придется для разгона использовать внешние двигатели.
В криогенных синхронных машинах используется так называемая обращенная конструкция, при которой размещение индуктора и якоря выполнено наоборот, т.е. индуктор расположен на статоре, а якорь – на роторе. В таких машинах обмотки возбуждения состоят из материалов, обладающими свойствами сверхпроводимости.
Какой лучше
Итак, в статье были разобраны устройство и принцип действия двух видов электродвигателей. Говорить о том, что какой-то из них лучше, нельзя. Но отметим, что асинхронные модели проще в конструктивном аспекте. Они надежнее в эксплуатации. Если их не перегружать, то срок службы может быть очень длительным. К сожалению, синхронные виды этим похвастаться не могут. Графитовые щетки быстро изнашиваются, им требуется замена. Но если не уследить, и графит сотрется полностью, то металлические держатели щеток начнут истирать токосъемное кольцо. А его выход из строя – это не только полный выход из строя двигателя, это большое количество искр (трение металла о металл) и возможность появления более серьезных неприятностей.
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
- При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Устройство синхронного двигателя
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
7.3.1. Усройство и принцип действия синхронного электродвигателя.
Характерный признак синхронного
двигателя – вращение ротора с
синхронной частотой n1
=
ƒ160
/pнезависимо от нагрузки на валу. Поэтому
синхронные двигатели используют в
системах автоматики для привода
механизмов, требующих строго стабильной
частоты вращения.
Синхронный двигатель, как и асинхронный,
состоит из неподвижного статора и
вращающегося ротора, разделенных
воздушным зазором (у синхронных двигателей
этот зазор несколько больше). Существуют
конструктивные разновидности исполнения
синхронных двигателей малой мощности,
отличающиеся в основном устройством
ротора: явнополюсные с электромагнитным
возбуждением, явнополюсные с возбуждением
постоянными магнитами, явнополюсные
реактивные (с невозбужден-ным ротором),
неявнополюсные гистерезисные.
Рассмотрим синхронные явнополюсные
двигатели с
электромагнитным возбуждением.
Эти двигатели изготавливаются обычно
мощностью в несколько киловатт и более
и поэтому в устройствах автоматики
широкого применения не получили.
Однако основные положения теории этих
двигателей используются при изучении
синхронных двигателей малой мощности
с возбуждением постоянными магнитами
и других типов.
Для изучения принципа действия синхронного
явнополюсного двигателя с электромагнитным
возбуждением используем модель,
представляющую собой две разделенные
воздушным зазором магнитные системы
с явно выраженными полюсами – внешнюю
1и внутреннюю
2(рис.
6). Если внешняя система полюсов неподвижна,
то благодаря силам магнитного притяжения
внутренняя система полюсов (ротор)
расположится так, что ее полюсы будут
находиться под полюсами внешней системы
противоположной полярности. При этом
силы
FMмагнитного притяжения, действу-ющие
на внутреннюю систему, не будут
создавать электромагнитного момента
(рис. 7,а), так как они направлены
радиально (по оси полюсов).
Если внешнюю систему полюсов вращать
с небольшой частотой n1, то в
начальный момент времени эта система
сместится относительно внутренней
на некоторый угол θ (рис. 7,б). При
этом вектор силы магнитного притяженияFMтакже повернется относительно оси
полюса ротора. Теперь эта сила состоит
из двух составляющих:FM=
Fn
+ Ft
причем нормальная составляющая
Fnнаправлена по оси полюса рото-
— 4 —
ра,
а тангенциальная
Ft–
перпендикулярно оси полюса. Совокупность
составляющих
Ftдействующих
на все полюсы ротора, создает на роторе
электромагнитный вращающий моментМ,
приводящий ротор во вращение с
синхронной частотойn1, т. е.
синхронно вращению внешней системе
полюсов.
Рис.
6. Упрощенная модель синхронного
двигателя:
Рис. 7. Возникновение
электромагнитного
а
– внешняя магнитная система;
момента на роторе синхронного
б
– внутренняя магнитная система.
двигателя.
Трехфазный синхронный двигатель
отличается от рассмотренной модели
тем, что в нем вместо внешней системы
полюсов имеется неявнополюсный
статор с распределенной трехфазной
обмоткой, аналогичный статору
асинхронного трехфазного двигателя.
Ротор синхронного двигателя – явнополюсной
конструкции с электромагнитным
возбуждением. При этом на полюсах ротора
2 располагают
полюсные
катушки
3(рис. 8), которые при последовательном
соединении образуют обмотку возбуждения
(ОВ).
При подключении ОВ к источнику постоянного
тока возникает магнитный поток возбуждения
ФВ, силовые линии которого
сцеплены с обмоткой статора1.
При включении обмотки статора в
трехфазную сеть создается вращающееся
с синхронной частотойn1магнитное поле с таким же числом
полюсов, как на роторе. Благодаря
взаимодействию полей статора и ротора
возникает электромагнитный момент,
вращающий ротор ссин-хронной
частотой. В результате электрическая
энергия сети преобразуется в механическую
энергию вращения.
Предположим, что ротор двигателя враща-
Рис.
8.
Магнитная система явнополюсногоется с частотой, отличающейся
от частоты
синхронного
двигателя (2р
= 4): вращения
поля статора, тогда в некоторые
1
– обмотка статора; 2
– полюса ротора; моменты
времени возбужденные полюса ро-
3
– полюсные катушки. тора
окажутся под одноименными полюсами
поля статора, возникнут силы магнитного
от-
— 5 —
талкивания
Суммарный электромагнитный момент
станет равным нулю и ротор остановится.
На рис. 9,
апоказана конструкция ротора синхронного
двигателя с явно выраженными полюсами.
Синхронный генератор. Принцип действия
Отличительным признаком синхронного генератора является жёсткая связь между частотой f переменной ЭДС, наведённой в обмотке
статора, и частотой вращения ротора n , называемой синхронной частотой вращения:
n = f / p
где p – число пар полюсов обмотки статора и ротора.
Обычно частота вращения выражается в об/мин, а частота ЭДС в Герцах (1/сек), тогда для количества оборотов в минуту формула примет вид:
n = 60·f / p
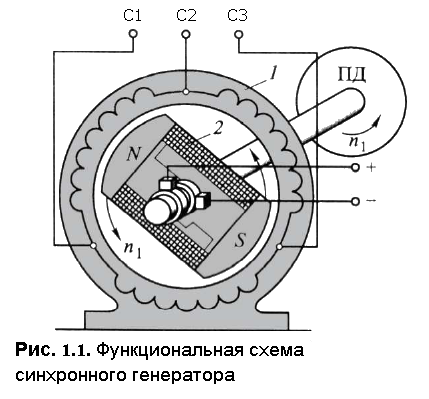
Приводным двигателем (ПД), в качестве которого используется турбина, двигатель внутреннего сгорания либо другой источник механической энергии, ротор генератора приводится во вращение с синхронной скоростью. При этом магнитное поле электромагнита ротора также вращается с синхронной скоростью и индуцирует в трёхфазной обмотке статора переменные ЭДС EA , EB и EC , которые будучи одинаковыми по значению и сдвинутыми по фазе относительно друг друга на 1/3 периода (120°), образуют симметричную трёхфазную систему ЭДС.
C подключением нагрузки к зажимам обмотки статора С1, С2 и С3 в фазах обмотки статора появляются токиIA, IB, IC , которые создают вращающееся магнитное поле. Частота вращения этого поля равна частоте вращения ротора генератора. Таким образом, в синхронном генераторе магнитное поле статора и ротор вращаются синхронно. Мгновенное значение ЭДС обмотки статора в рассматриваемом синхронном генераторе
e = 2Blwv = 2πBlwDn
Здесь:B – магнитная индукция в воздушном зазоре между сердечником статора и полюсами ротора, Тл;l – активная длина одной пазовой стороны обмотки статора, т.е. длина сердечника статора, м;w – количество витков;v = πDn – линейная скорость движения полюсов ротора относительно статора, м/с;D – внутренний диаметр сердечника статора, м.
Формула ЭДС показывает, что при неизменной частоте вращения ротора n форма графика переменной ЭДС обмотки якоря (ста-
тора) определяется исключительно законом распределения магнитной индукции B в зазоре между статором и полюсами ротора. Если график магнитной индукции в зазоре представляет собой синусоиду B = Bmax sinα , то ЭДС генератора также будет синусоидальной. В
синхронных машинах всегда стремятся получить распределение индукции в зазоре как можно ближе к синусоидальному.
Так, если воздушный зазор δ постоянен (рис. 1.2), то магнитная индукция B в воздушном зазоре распределяется по трапецеидальному закону (график 1). Если же края полюсов ротора «скосить» так, чтобы зазор на краях полюсных наконечников был равен δmax (как это показано на рис. 1.2), то график распределения магнитной индукции в зазоре приблизится к синусоиде (график 2), а, следовательно, и график ЭДС, индуцированной в обмотке генератора, приблизится к синусоиде.
Частота ЭДС синхронного генератора f (Гц) пропорциональна синхронной частоте вращения ротора n (об/с)
f = pn
где p – число пар полюсов.
В рассматриваемом генераторе (см. рис.1.1) два полюса, т.е. p = 1.
Для получения ЭДС промышленной частоты (50 Гц) в таком генераторе ротор необходимо вращать с частотой n = 50 об/с (n = 3000 об/мин).
Недостатки электродвигателя
Специалисты отмечают два основных минуса таких электродвигателей. В первую очередь это сложность конструкции. Не механической части, а именно электронной основы, которая обеспечивает управление мотором. Применение микропроцессоров, датчиков, инверторов и сопутствующей электротехнической фурнитуры требует соответствующего подхода к обеспечению надежности работы компонентов системы. Таким образом, повышается и стоимость обслуживания техники. Вместе с этим, отмечается и дороговизна магнитов, на которых базируется вентильный двигатель даже в простых однофазных исполнениях. На практике пользователи стараются заменять недешевые элементы и расходники, вместе с этим упрощая и систему управления. Но такие меры сами по себе требуют определенных ресурсов, не говоря о том, что снижается эффективность двигателя.
Устройство синхронного электродвигателя
Строение агрегата данного вида типично. Двигатель состоит из:
- Неподвижной части (якорь или статор).
- Подвижной части (ротор или индуктор).
- Вентилятора.
- Контактных колец.
- Щеток.
- Возбудителя.
Статор представляет собой сердечник, состоящий из обмоток, который заключен в корпус. Индуктор комплектуется электромагнитами постоянного тока (полюсами). Конструкция индуктора может быть двух видов – явнополюсная и неявнополюсная. В статоре и роторе расположены ферромагнитные сердечники, изготовленные из специальной электротехнической стали. Они необходимы для уменьшения магнитного сопротивления и улучшения прохождения магнитного потока.
Частота вращения ротора в синхронном двигателе равна частоте вращения магнитного поля. Независимо от подключаемой нагрузки частота ротора неизменна, так как число пар полюсов магнитного поля и ротора совпадают. Их взаимодействие обеспечивает постоянную угловую скорость, не зависящую от момента, приложенного к валу.
Операция
Вращающееся магнитное поле образуется из суммы векторов магнитного поля трех фаз обмоток статора.
Работа синхронного двигателя происходит за счет взаимодействия магнитных полей статора и ротора. Обмотка статора, состоящая из трехфазной обмотки, имеет трехфазное питание, а ротор — источник постоянного тока. Трехфазная обмотка статора, по которой проходят трехфазные токи, создает трехфазный вращающийся магнитный поток (и, следовательно, вращающееся магнитное поле). Ротор блокируется вращающимся магнитным полем и вращается вместе с ним. Когда поле ротора синхронизируется с вращающимся магнитным полем, говорят, что двигатель синхронизирован. Однофазная (или двухфазная, полученная из однофазной) обмотка статора возможна, но в этом случае направление вращения не определено, и машина может запускаться в любом направлении, если это не предотвращается пусковыми устройствами.
Когда двигатель работает, скорость двигателя зависит только от частоты питания. Когда нагрузка двигателя превышает предельную нагрузку, двигатель теряет синхронизацию, и обмотка возбуждения больше не следует вращающемуся магнитному полю. Поскольку двигатель не может создавать (синхронный) крутящий момент, если он выходит из синхронизации, на практике синхронные двигатели имеют частичную или полную обмотку с короткозамкнутым ротором (амортизатор) для стабилизации работы и облегчения запуска. Поскольку эта обмотка меньше, чем у эквивалентного асинхронного двигателя и может перегреваться при длительной работе, а также из-за того, что в обмотке возбуждения ротора индуцируются большие напряжения с частотой скольжения, устройства защиты синхронного двигателя обнаруживают это состояние и прерывают подачу питания (не в такт защита).
Применение
- Синхронный двигатель используется для улучшения коэффициента мощности. Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
- Синхронные двигатели находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким. Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.





