Назначение и принцип действия асинхронного двигателя
Содержание:
- Ротор асинхронного двигателя
- Устройство
- Трехфазный асинхронный двигатель с фазным ротором
- Подключение асинхронного двигателя
- Преимущества и недостатки асинхронных электродвигателей
- Конструкция мотора
- 7.1. Принцип действия асинхронного двигателя
- Основные параметры электродвигателя
- Синхронный электродвигатель
- Обмотки ротора
- История появления
- Как устроен асинхронный двигатель
Ротор асинхронного двигателя
Давайте более подробно рассмотрим, из чего же состоит ротор асинхронного двигателя.
Самая главная часть – это вал. Иначе, как бы происходило вращение?
На вал ротора с двух сторон надеваются подшипники, которые крепятся к передней и задней крышкам и центруют ротор ровно посередине статора.
Далее идет сердечник, набранный из листов специальной электротехнической стали, которые изолированы друг от друга. Кстати, сетевые трансформаторы собираются из такой же стали.
Как вы можете далее заметить, в сердечнике ротора есть специальные пазы
В них вставляются медные или алюминиевые стержни,
которые замыкаются на кольцо с обеих сторон, образуя так называемую “беличью клетку”.
В общем виде полностью собранный ротор асинхронного двигателя выглядит вот так.
А вот так он выглядит в реальном двигателе.
Всегда помните, что в асинхронном двигателе вращается ротор, а не статор. Статор – это неподвижная часть, а ротор – подвижная часть электродвигателя. В рабочем состоянии двигателя между ротором и статором всегда имеется воздушный зазор. При работе двигателя ротор ни в коем случае не должен задевать статор двигателя.
Устройство
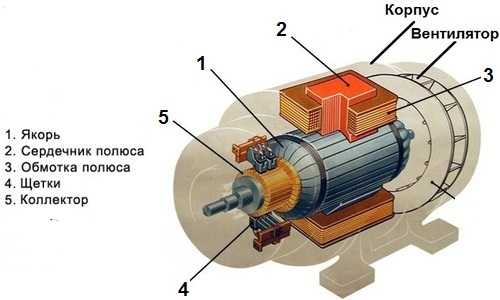
Основными частями синхронной машины являются якорь и индуктор (обмотка возбуждения). Как правило, якорь располагается на статоре, а на отделённом от него воздушным зазором роторе находится индуктор — таким образом, по принципу действия синхронная машина представляет собой как бы «вывернутую наизнанку» машину постоянного тока, переменный ток для обмотки якоря которой не получается с помощью коллектора, а подводится извне.
Якорь представляет собой одну или несколько обмоток переменного тока. В двигателях токи, подаваемые в якорь, создают вращающееся магнитное поле, которое сцепляется с полем индуктора, и таким образом происходит преобразование энергии. Поле якоря оказывает воздействие на поле индуктора и называется поэтому также полем реакции якоря. В генераторах поле реакции якоря создаётся переменными токами, индуцируемыми в обмотке якоря от индуктора.
Индуктор состоит из полюсов — электромагнитов постоянного тока или постоянных магнитов (в микромашинах). Индукторы синхронных машин имеют две различные конструкции: явнополюсную или неявнополюсную. Явнополюсная машина отличается тем, что полюса ярко выражены и имеют конструкцию, схожую с полюсами машины постоянного тока. При не явнополюсной конструкции обмотка возбуждения укладывается в пазы сердечника индуктора, весьма похоже на обмотку роторов асинхронных машин , с той лишь разницей, что между полюсами оставляется место, не заполненное проводниками (так называемый большой зуб). Неявнополюсные конструкции применяются в быстроходных машинах, чтобы уменьшить механическую нагрузку на полюса.
Для уменьшения магнитного сопротивления, то есть для улучшения прохождения магнитного потока, применяются ферромагнитные сердечники ротора и статора. В основном они представляют собой шихтованную (набранную из отдельных листов) конструкцию из электротехнической стали.
Трехфазный асинхронный двигатель с фазным ротором
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в «звезду», а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.
Фазный ротор
Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
Обозначение выводов обмоток ротора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M |
Обозначение выводов обмоток ротора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода |
|---|---|
| Соединение звездой (число выводов 3 или 4) | |
| первая фаза | Р1 |
| вторая фаза | Р2 |
| третья фаза | Р3 |
| нулевая точка | |
| Соединение треугольником (число выводов 3) | |
| первый вывод | Р1 |
| второй вывод | Р2 |
| третий вывод | Р3 |
Примечание: Контактные кольца роторов асинхронных двигателей обозначают так же, как присоединенные к ним выводы обмотки ротора, при этом расположение колец должно быть в порядке цифр, указанных в таблице, а кольцо 1 должно быть наиболее удаленным от обмотки ротора. Обозначение самих колец буквами необязательно.
Пуск АДФР
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора.
Применяются проволочные и жидкостные реостаты.
Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат представляет собой сосуд с электролитом, в котором опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов .
Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца.
При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
ГОСТ 26772-85 Машины электрические вращающиеся. Обозначение выводов и направление вращения.
А.И.Вольдек. Электрические машины. Учебник для студентов высш. техн. заведений. изд. 2-е, перераб. и доп.-Ленинград: Энергия, 1974.
Подключение асинхронного двигателя
Трехфазный переменный ток
Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду.
Трехфазный ток (разница фаз 120°)
Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Фазное напряжение — разница потенциалов между началом и концом одной фазы
Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль)
Линейное напряжение — разность потенциалов между двумя линейными проводами (между фазами).
| Звезда | Треугольник | Обозначение |
|---|---|---|
| Uл, Uф — линейное и фазовое напряжение, В, | ||
| Iл, Iф — линейный и фазовый ток, А, | ||
| S — полная мощность, Вт | ||
| P — активная мощность, Вт |
Внимание: Несмотря на то, что мощность для соединений в звезду и треугольник вычисляется по одной формуле, подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Пример: Допустим электродвигатель был подключен по схеме «звезда» к трехфазной сети переменного тока Uл=380 В (соответственно Uф=220 В) и потреблял ток Iл=1 А
Полная потребляемая мощность:
S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
Подключение электродвигателя по схеме звезда и треугольник
Обозначение выводов статора трехфазного электродвигателя
Обозначение выводов обмоток статора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | U1 | U2 |
| вторая фаза | V1 | V2 |
| третья фаза | W1 | W2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | U | |
| вторая фаза | V | |
| третья фаза | W | |
| точка звезды (нулевая точка) | N | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | U | |
| второй вывод | V | |
| третий вывод | W |
Обозначение выводов обмоток статора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | C1 | C4 |
| вторая фаза | C2 | C5 |
| третья фаза | C3 | C6 |
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | C1 | |
| вторая фаза | C2 | |
| третья фаза | C3 | |
| нулевая точка | ||
| Соединение треугольником (число выводов 3) | ||
| первый вывод | C1 | |
| второй вывод | C2 | |
| третий вывод | C3 |
Преимущества и недостатки асинхронных электродвигателей
Современные преобразователи электроэнергии в энергию механическую обладают следующими преимуществами:
- Доступная стоимость. Цена асинхронных двигателей намного ниже, чем синхронных.
- Распространённость. Асинхронную электрическую машину можно приобрести на любом специализированном рынке. Полно предложений и в Интернете.
- Надёжность. Двигатель обладает способностью выдерживать небольшой перепад напряжения.
- Простота эксплуатации. Устройство асинхронного типа легко запускается, поскольку, чтобы его включить применяется простейшая схема.
- Довольно высокий уровень КПД. Он значительно выше, чем у синхронных электродвигателей.

К недостаткам относятся:
- Довольно высокое значение пускового тока в условиях номинальной скорости. Первый пуск может привести к перегрузке электросети.
- Почти полное отсутствие защиты. Защищённое исполнение обмоток не спасает двигатель от поломок. Нередко резкие перепады напряжения приводят к сгоранию обмотки.
- Коэффициент скольжения намного ниже, чем у синхронных моторов.

Конструкция мотора
Устройство и принцип действия синхронных двигателей несложны.
Конструкция включает в себя такие элементы:
- Неподвижная часть – статор. На ней находится три обмотки, которые соединяются по схеме «звезда» или «треугольник». Статор собран из пластин электротехнической стали с высокой степенью проводимости.
- Подвижная часть – ротор. На нем тоже имеется обмотка. При работе на нее подается напряжение.
Между ротором и статором имеется прослойка воздуха. Она обеспечивает нормальное функционирование двигателя и позволяет магнитному полю беспрепятственно воздействовать на элементы агрегата. В конструкции присутствуют подшипники, в которых вращается ротор, а также клеммная коробка, расположенная в верхней части мотора.
7.1. Принцип действия асинхронного двигателя
Двигатели переменного тока делятся на синхронные и асинхронные двигатели. Асинхронные двигатели (АД) в свою очередь делятся на двух и трехфазные, из которых в качестве исполнительных двигателей в системах автоматического управления в основном применяются маломощные двигатели до 300 Вт.
Их преимущества перед ДПТ: малая инерционность, бесконтактность, дешевизна.
Их недостатки в сравнении с ДПТ: большие тепловые потери, малый пусковой момент, нелинейные характеристики.
Принцип действия рассмотрим на примере двухфазного асинхронного двигателя, с полым ротором в виде алюминиевого стакана. На статоре этого двигателя расположены две обмотки. Эти обмотки расположены на магнитопроводе под углом 90 друг к другу. На эти обмотки подаются синусоидальные напряжения, сдвинутые по фазе на 90 друг к другу. Под действием этих напряжений в обмотках протекают токи I1, I2, также синусоидальные и сдвинутые по фазе на 90. Будем считать, что амплитуды их равны. Эти токи, в свою очередь, создают в магнитопроводе два пульсирующих вектора магнитной индукции и, соответственно два магнитных потока, равных по амплитуде и сдвинутые по фазе на 90 друг к другу в пространстве и времени. Они суммируются, и создается результирующий магнитный поток, имеющий постоянную амплитуду и вращающийся по окружности с частотой w, где w=2p¦, а ¦ — частота сети.
Рассмотрим получение кругового вращающегося магнитного поля в случае двухфазной системы (рис. 70).
Рис. 70. Двухфазная система
При пропускании через катушки гармонических токов каждая из них в соответствии с вышесказанным будет создавать пульсирующее магнитное поле. Векторы ВА и ВВ, характеризующие эти поля, направлены вдоль осей соответствующих катушек, а их амплитуды изменяются также по гармоническому закону. Если ток в катушке В отстает от тока в катушке А на 90, то ВА= Вmsin(wt) и ВВ= Вmsin(wt-90).
Найдем проекции результирующего вектора магнитной индукции Вна оси x и y декартовой системы координат, связанной с осями катушек:
Модуль результирующего вектора магнитной индукции в соответствии с рис. 70 равен,
при этом для тангенса угла a , образованного этим вектором с осью абсцисс, можно записать
, откуда a=wt.
Полученные соотношения показывают, что вектор результирующего магнитного поля неизменен по модулю и вращается в пространстве с постоянной угловой частотой , описывая окружность, что соответствует круговому вращающемуся полю.
Симметричная трехфазная система катушек также позволяет получить круговое вращающееся магнитное поле. Рис. 71. Каждая из катушек А, В и С при пропускании по ним гармонических токов создает пульсирующее магнитное поле. Катушки питаются трехфазной системой токов с временным сдвигом по фазе на 120. Поэтому для мгновенных значений индукций катушек имеют место соотношения
; ; .
Произведя аналогичные расчеты, получим, что модуль результирующего вектора магнитной индукции равен В=1,5 Вm, и также вращается в пространстве с постоянной угловой частотой ,
Рис. 71. Трехфазная система
Силовые линии вращающегося магнитного поля пересекают ротор двигателя, выполненный, например, в виде алюминиевого стакана. В материале ротора наводятся вихревые токи, которые взаимодействуют с вращающимся магнитным потоком статоре и создают движущий момент. Под действием этого момента ротор начинает раскручиваться и набирает скорость до тех пор, пока движущий момент не будет уравновешен моментом, создаваемым нагрузкой.
Скорость вращения ротора асинхронного двигателя всегда меньше скорости вращения поля, так как в случае их равенства результирующий магнитный поток будет неподвижен относительно ротора, вихревых токов не будет, и, следовательно, не будет движущего момента. Поэтому двигатель называется асинхронным. Величина отставания скорости вращения ротора от скорости вращения поля характеризуется скольжением.
При заторможенном роторе S=1, в идеальном случае при вращении со скоростью поля S=0.
Используются различные конструкции ротора АД. Есть трехфазные АД с фазным ротором, при этом на роторе также намотаны три, пространственно сдвинутых обмотки. В эти обмотки обычно включают внешние сопротивления (реостаты), которыми ограничивается пусковой ток и может регулироваться скорость вращения ротора. Двухфазные АД изготавливают с короткозамкнутой обмоткой: в виде беличьего колеса; в виде вала или стакана из проводящего материала. .Рис 72, 73, 74.
Рис. 72. Трехфазный АД с фазным ротором
Рис. 73. Ротор АД в виде беличьей клетки (а) и в виде стакана (б)
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
- При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Синхронный электродвигатель
Итак, синхронный электродвигатель – это мотор с постоянной скоростью вращения ротора, плюс возможность регулировать эту скорость. Устройство синхронного мотора достаточно сложное. Чтобы в нем разобраться, необходимо рассмотреть фотографию ниже.
Здесь четко показано, что обмотки двигателя располагаются на якоре или роторе агрегата. Концы обмоток выведены и закреплены на токосъемное кольцо, а, точнее, к его секторам. Сам же ток подается на это же кольцо только через графитовые щетки, которые подключены к питающей сети.
Внимание! Концы обмоток подключаются таким образом, что при работе мотора через щетки электрический ток попадал всегда только на одну пару. У двигателя этой модели больше уязвимых мест, чем у асинхронной
У двигателя этой модели больше уязвимых мест, чем у асинхронной.
- Снашиваются графитные щетки.
- Плохой контакт между токосъемным кольцом и щетками за счет ослабления пружины, которая прижимает последние к кольцу (коллектору).
- Изнашиваются подшипники.
- Образование грязевого налета на поверхности токосъемного кольца.
Теперь переходим к другой позиции – принцип работы синхронного электродвигателя. Вращающийся момент внутри мотора образуется за счет взаимодействия магнитного поля, которое образуется в обмотках возбуждения, и тока, проходящего по якорю агрегата. Но тут есть один момент – изменяющееся направление тока (переменного) будет менять и направление вращения магнитного поля двигателя. Правда, смена вращения будет меняться и в корпусе аппарата, и на якоре одновременно. Вот почему вращение ротора мотора всегда происходит с одинаковой скоростью.
Именно поэтому изменить эту величину можно лишь тем, если изменить напряжение подаваемой на щетки электроэнергии. Вспомните пылесосы, где всасываемую мощность изменяют переключателем, который просто соединен с реостатом. А мощность пылесоса зависит от скорости вращения вала крыльчатки, то есть вала электродвигателя. Чем больше скорость, тем больше мощность всасывания.
Но синхронные электродвигатели в промышленности своего основного места не нашли. Здесь в основном используются асинхронные модели.
Обмотки ротора
Вращающаяся часть асинхронного двигателя — ротор, так же как и статор, имеет обмотку. Она помещена в пазах 1 стального цилиндра (рис. 9), набранного, как и сердечник статора, из листов электротехнической стали (рис. 10) толщиной 0,5 мм. После штамповки листы собирают в пакет, плотно сжимают, насаживают на вал двигателя и закрепляют. В пазах ротора помещается или короткозамкнутая, или фазная обмотка. Изоляцией между листами ротора обычно
Рис. 9. Фазный ротор асинхронного двигателя: 1 — сердечник ротора; 2 — обмотка ротора; 3 — контактное кольцо
Рис. 10. Стальной лист ротора
Рис. 11. Продольный разрез асинхронного двигателя с фазным ротором: 1 — вал; 2 — активная сталь ротора; 3 — обмотка статора; 4 — станина; 5 — активная сталь статора; 6 — подшипниковый щит; 7 — контактные кольца; 8 — щетки; 9 — коробка выводов
Рис. 12. Трехфазный асинхронный двигатель с фазным ротором
Рис. 13. Короткозамкнутый ротор двигателя с алюминиевой литой обмоткой
Рис. 14. Беличье колесо
Рис. 15. Трехфазный асинхронный короткозамкнутый двигатель
Рис. 16. Роторы короткозамкнутые: а — с обычной клеткой; б — с двойной клеткой; в — с глубокой клеткой
служит пленка окисла. Активная сталь ротора является частью магнитной цепи двигателя. Обмотка может быть фазной, построенной по тому же принципу, что и обмотка статора. Делается это в том случае, когда в фазы обмотки включается добавочное сопротивление (реостат), необходимый при пуске или регулирования скорости двигателя. Фазный ротор показан на (рис. 9). Обмотка ротора 2 соединяется в звезду, а выводы подключаются к трем контактным кольцам 3, насаженным на вал ротора и изолированным от вала и друг от друга. Контактные кольца изготавливаются из меди, бронзы, редко из стали.
Продольный разрез двигателя с фазным ротором показан на рис. 11.
Чаще изготовляются двигатели с короткозамкнутой обмоткой ротора. Если в пазы ротора уложены голые медные или алюминиевые стержни, концы которых замкнуты накоротко кольцами, то такая обмотка называется короткозамкнутой. Обмотка образует клетку, называемую беличьей; показана отдельно на рис. 14. Короткозамкнутую обмотку ротора делают в трех модификациях: с нормальной клеткой, с двойной клеткой и с глубоким пазом (рис. 16). Для двигателей до 100 кВт чаще всего клетку получают путем отливки из алюминия, при этом одновременно отливаются торцевые кольца и лопасти вентилятора для охлаждения двигателя (рис. 13). Роторные обмотки также выполняют из меди и ее сплавов. В пазы прямоугольной или трапецеидальной формы забивают стержни, к стержням с обеих сторон припаивают твердым припоем замыкающие кольца.
Вид двигателя с фазным ротором и с короткозамкнутым, имеющим внешний обдув для охлаждения, показан на рис. 12 и 15.
История появления
История создания асинхронного электродвигателя начинается в 1888 году, когда Никола Тесла запатентовал схему электродвигателя, в этом же году другой ученый в области электротехники Галлилео Феррарис опубликовал статью о теоретических аспектах работы асинхронной машины.
В 1889 году российский физик Михаил Осипович Доливо-Добровольский получил в Германии патент на асинхронный трехфазный электрический двигатель.
Все эти изобретения позволили усовершенствовать электрические машины и привели к тому, что в промышленность стали массово применяться электрические машины, которые значительно ускорили все технологические процессы на производстве, повысили эффективность работы и снизили её трудоемкость.
В настоящий момент самый распространенный электродвигатель, эксплуатируемый в промышленности, является прототипом электрической машины, созданной Доливо-Добровольским.
Как устроен асинхронный двигатель
Первая главная деталь в электромоторе называется статором, вторая – ротором. Статор сделан в форме цилиндра из крепкого листа нержавеющей стали. Внутри сердечника статора установлены обмотки из специальных проводов. Оси проводов укладываются под углом в 120°. Для работы на разных электросетях концы кабелей скрепляются в виде треугольника или звезды.
Роторы в асинхронном двигателе подразделяются на 2 типа:
- Короткозамкнутый. Он является сердечником, в который заливается раскаленный металл. После этого в нем появляются железные стержни, замыкающиеся маленькими торцевыми колечками. Подобная схема конструкции именуется “беличьей клеткой”. В устройствах с высокой мощностью алюминий заменяется на медь.
- С фазами. Мотор имеет толстую трехфазную обмотку, которая почти не отличается от обмотки статора. В основном концы проводов скрепляются в форме звезды, а затем дополнительно закрепляются колечками. Используя щетку, которая подсоединена к обручам, к цепи можно подключить дополнительный резистор. Последний необходим для того, чтобы человек мог контролировать переменное сопротивление в фазе ротора.





